お知らせ
【無料ダウンロード・全10ページ】ロボットハンド設計・製作のポイント
2020年10月29日 木曜日
昨今の人手不足対策やコロナ禍による「三密」の回避などを背景 として、「省力化」「自動化」を目的とした産業用ロボット、あるいは 協働ロボットの活用が広く進んでいます。
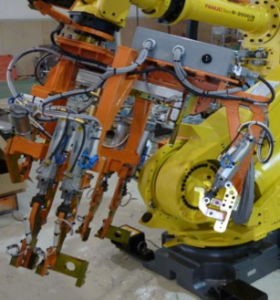
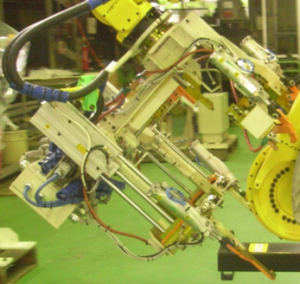
ロボットの活用においては、ロボットの「腕」の先に取り付ける「ロボットハンド」の工夫により、
様々な動作、作業を実現することができます。
本資料ではロボットハンドの企画、設計の上で押さえておくべきポイントについて解説します。
【資料イメージ】



【目次】
1.ロボットハンド設計で押さえておくべきポイント
2.可搬重量とハンドの関係
3.負荷モーメントとハンドの関係
4.イナーシャ(慣性モーメント)とハンドの関係
5.ハンド強度・剛性の関係